�{ʽ����ˮ����λ�x���O(sh��)Ӌ(j��)�xȡ�c��(y��ng)��")
һ�N�������l��(d��o)�{ʽ����ˮ����λ�x���O(sh��)Ӌ(j��)�xȡ�c��(y��ng)��
ժҪ:�S����(sh��)����Ӽ��g(sh��)��Ӌ(j��)��C(j��)���g(sh��)�IJ���l(f��)չ,��λ�y(c��)�����g(sh��)�l(f��)չѸ��,���Õr(sh��)�g�г�ԭ���ǽ��|ʽ�y(c��)���ij������_(d��)����λ�y(c��)�����g(sh��),߀�Б�(y��ng)���^��������ݼ����N�������λ�y(c��)�����g(sh��),���������ɞ���λ�y(c��)�������е���Ҫ�ֶ�,�cԭ��C(j��)еʽ����λ�y(c��)��?j��)x���ڸ��N��(y��ng)���I(l��ng)��(y��u)ȱ�c(di��n)���a(b��)�����Ľ�B��һ�N�������l��(d��o)�{ʽ��ˮ������λ�x���O(sh��)Ӌ(j��)ԭ���������xȡ,����(y��ng)���������(xi��ng)Ŀ����ˮ����y(c��)����
���l��(d��o)�{��λ�z�y(c��)���g(sh��)�Ǯ�(d��ng)ǰ�����^����ԭ���^���Ƚ����λ�x,�܉�?q��)��S����(y��ng)�È�(ch��ng)�ό�(du��)������(n��i)���|(zh��)�M(j��n)����λ���λ�y(c��)��,�c���y(t��ng)���ʽ��λ�x��������ܴ�ļ��g(sh��)��(y��u)��(sh��)���S���҇�(gu��)�C�χ�(gu��)���IJ�������,ʯ��ʯ�����I(y��)ȡ�����L(zh��ng)����M(j��n)��,��λ�x���͚�����湤�̽��O(sh��)�^���бز����ٵ���Ҫ�x���O(sh��)��,�ڜy(c��)����λ��Һλ�ȷ���l(f��)�]����Ҫ������
1 ��λӋ(j��)����λ�x��
���l��(d��o)�{��λ�x��һ�N�����ʽ�l(f��)չ������,���з����ϡ����ɿ�������(zh��n)�_���m���Ը��V��������λ���Ƽ��g(sh��),�����ʽ��λ���g(sh��)������(j��)�������ԓ�N��λ�x��ԭ��չ�_�������о�,����(du��)�䑪(y��ng)����r����̽ӑ��
2 ���ʽ��λ�x����ԭ��
���ʽ��λӋ(j��)����һ��(g��)�����н�����һ��(g��)���, ��ԓ��ݵ�һ�O�O(sh��)�Þ���]��ij�����еėU��̽�^,��ݵ�����һ�O�t�O(sh��)�Þ�һ��(g��)�ӵصĽ��ٰ�(ԓ���ٰ�ͨ����������),���O(sh��)�Կ՚����|(zh��)����ݞ�C1,�O(sh��)�Ա��y(c��)���Ϟ���|(zh��)����ݞ�C2,����Ӌ(j��)���늘O�g�����ֵ��:C=C1+C2������҂�?c��)O(sh��)���y(c��)���|(zh��)�錧(d��o)�w,��ô�ͱ����̽�^�ϼ�һ�ӽ^����,���O(sh��)���y(c��)�����ϲ��Խ^���Ӟ���|(zh��)����ݞ�C1a,�Կ՚����|(zh��)����ݞ�C1b,���y(c��)���ϲ����Խ^���Ӟ���|(zh��)����ݞ�C2a,�t늘O�g����ݞ�:C=(C1a·C1b)/(C1a+C1b)+C2a����(j��ng)�ƌ�(d��o)�ɵÃ�늘O�g�����C�c���y(c��)��λ�߶�h���P(gu��n)ϵ��:C=C0 +k·h��ʽ��C0��k���c��늳���(sh��)�������Y(ji��)��(g��u)���P(gu��n)�ij���(sh��)����(d��ng)��λ׃���r(sh��),���y(c��)���|(zh��)��(du��)̽�^�Ľ��]�߶�h�l(f��)��׃��,�Ķ�ʹ���C�l(f��)��׃��,ͨ�^�y(c��)�����C�õ���λ�߶�h(������λ�x�y(c��)��Ŀ��(bi��o)ֵ)��
3 ���l��(d��o)�{��λ�x����ԭ��
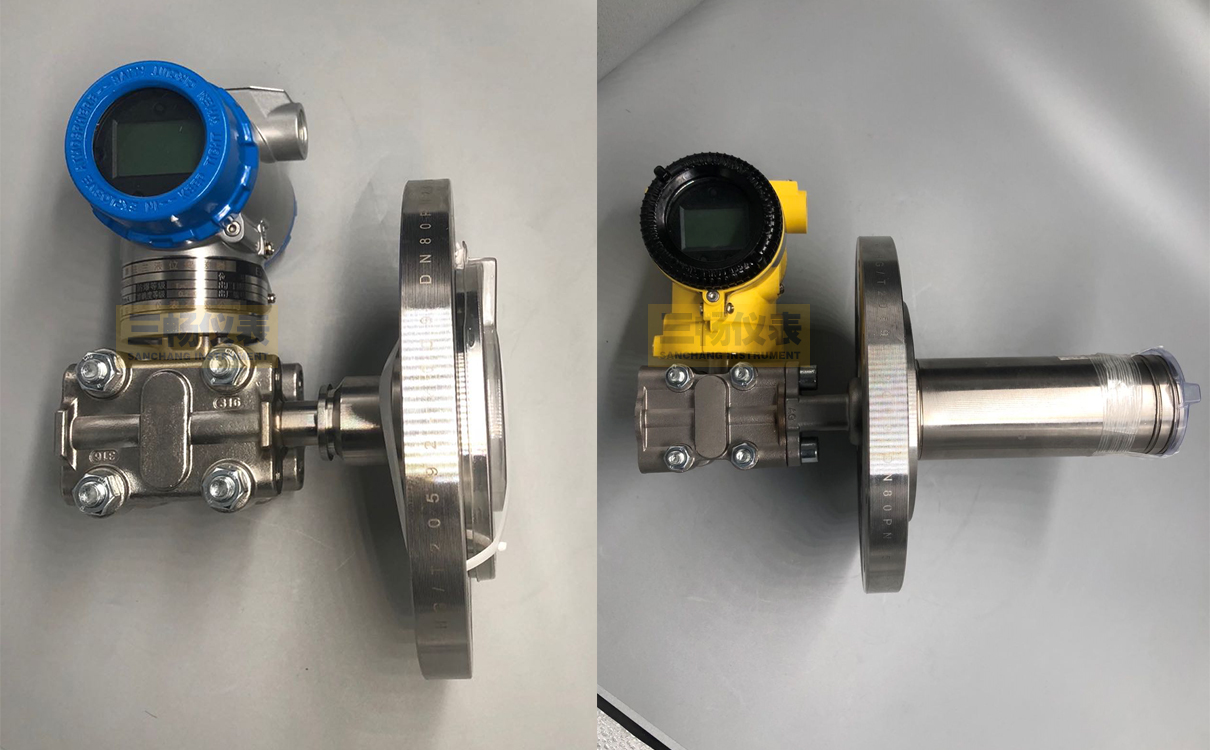
3.1 ���l��(d��o)�{���g(sh��)��(ji��n)��
���l��(d��o)�{��λ�x��һ�N�����ʽ�l(f��)չ�����ķ����ϸ��ɿ�������(zh��n)�_��ʹ���Ը��V��Һλ�y(c��)�����g(sh��),�c���ʽ��λ�x��Ⱦ��ȸ����������Ը��������l���Ǹ��l�o��늲��V,��(d��o)�{���迹�ĵ���(sh��),��������Գɷ�������Գɷ���늸��Գɷ־C�϶��������l��(d��o)�{��λӋ(j��)ͨ�����Ƿdz��ߵ�,��֧��HART�f(xi��)�h������ʽ��λ׃�������@ʾ��Խ������:(1)�^�ߵĜ�(zh��n)�_��;(2)���ñ��攵(sh��)��(j��),����늁Gʧ;(3)�����M(j��n)������������(bi��o)��;(4)��λ��������c(di��n)��(bi��o)��;(5)���^����ݔ��;(6)�����M(j��n)�зǾ���У����
3.2 ���l��(d��o)�{Һλ�x����ԭ��
�������ʽ��λ�x���ϵęM����e�^С,���ϵĵ�Ч����^��,���ϵĵ�Ч�·��D1��ʾ,���Ͽ��Կ������S��С��������ݽM�����Ĕ�(sh��)�W(xu��)�Ͽ����C��,ֻҪճ��������L(zh��ng),ճ���ӵ�������ݾ�����ͬ���迹, �@�������l��(d��o)�{���������y(c��)��늘O�ώ���ճ���ӵ���������ڽӵ�, �ڜy(c��)��늘O�͵�֮�g��һ���l����(l��)��̖(h��o),�ɒ��ϵĵ�Ч�·��֪,�ڜy(c��)��늘O�͵�֮�g�]��ֱ��ͨ·,���,���ԵÒ���늘O�ĵ�Ч�·��
�O(sh��):U���l�ʞ�ω�ļ���(l��)늉�;Iw�����^���y(c��)��(sh��)�H��λ��ݵ����;Ig�����^ճ���ӵ����,I�鿂�������I=Iw+Ig��Cw�錍(sh��)�H����λ���,Cg��Rg�քe�������ݺ͒������,
��(d��ng)ճ���ӟo���L(zh��ng)�r(sh��),�����l��(d��o)�{������֪,Cg�cRg���迹���,��Rg=1/ω·Cg��
�O(sh��):U����λ��0,��U=U<0°,��Iw =jω·Cw·U=ω·Cw·U<90° (1)Ig={1/Rg+jω·Cg }·U=(1+j)ω·Cg·U =√2ω·Cg·U<45°
(2)��ʽ(1)��(2)��֪,Ig����λ�����Iw����λπ/4���O(sh��)Iw����λ��0,�����π/4̎��(du��)I�M(j��n)�Мy(c��)��,�t�˿�ճ�������I g�ķ�ֵ����,�@�Ӝy(c��)�õ������ֻ����Iw,��Iw�c��(sh��)�H��λ���Cw֮�g���ھ����P(gu��n)ϵ,���,��ω·t =π/4+2kπ(k=1,2,…n)�r(sh��)��(du��)���I �M(j��n)�Мy(c��)��,���Եõ���(sh��)�H����λֵ,�@�������l��(d��o)�{��λ�x���Ĺ���ԭ����
4 ���l��(d��o)�{Һλ�x�y(c��)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)ԭ��
4.1 ϵ�y(t��ng)�O(sh��)Ӌ(j��)
ϵ�y(t��ng)��D��2��ʾ,����(g��)�y(c��)��?j��)xϵ�y(t��ng)�ɘ�(bi��o)��(zh��n)������̖(h��o)�l(f��)��������λ����������ͨ�V������׃����늘�y(c��)��������(q��)��(d��ng)�·��ͬ����̖(h��o)���C(j��)ϵ�y(t��ng)���I�P�·���ɘӱ����·����(b��o)���·���@ʾ�·��11��(g��)���ֽM�ɡ�����,��(bi��o)��(zh��n)������̖(h��o)�l(f��)���·��(w��n)���l(f��)���l�ʞ�100kHz�����l��̖(h��o), ���Ǻ��������l�ʵĸɔ_��̖(h��o),������̖(h��o)횽�(j��ng)��ͨ�V���·,���ɔ_��̖(h��o)�^�V��,�Ķ��@�÷�(w��n)���������Ƽ�����100kHz���l��̖(h��o)������(q��)��(d��ng)�·��������Ҫ�����������λ�y(c��)������ֵ,ʹ����(g��)ϵ�y(t��ng)�����ܸ��郞(y��u)Խ��
׃����늘�y(c��)���·�������nj���λ��̖(h��o)�D(zhu��n)��ϵ�y(t��ng)�����R(sh��)�e��늉���̖(h��o),늉���̖(h��o)��(j��ng)�^̎��׃?y��u)���?����һ·������λ��Ϣ��������Ϣ,����һ·�ṩ�ɘӕr(sh��)�̵�ͬ����̖(h��o)�����,ͬ����̖(h��o)��(j��ng)�^ϵ�y(t��ng)̎��,���Խo����(zh��n)�_�IJɘӕr(sh��)��,��������(y��ng)�r(sh��)�̌�(du��)���w�y(c��)����̖(h��o)�M(j��n)�вɘ�,�@�Ӿ͵õ���(zh��n)�_����λ��Ϣ,����늘O�����`����
ϵ�y(t��ng)�z�y(c��)�õ�����λ��̖(h��o)��(j��ng)��ͨ�V���·̎��,�������иɔ_,��̖(h��o)�M(j��n)��̎��ϵ�y(t��ng),�M(j��n)��ADģ��(sh��)�D(zhu��n)�Q,��(sh��)��(j��)Ӌ(j��)��,�ó���(sh��)�H��λ��(sh��)��(j��),�ٌ���(sh��)�H��λ��(sh��)��(j��)�c�O(sh��)����(sh��)��(j��)ֵ�M(j��n)�Ќ�(du��)��,�ó���λֵ������,�����(du��)��֮���^��(b��o)������,ϵ�y(t��ng)�l(f��)����(b��o)����̖(h��o)���I�P�·�������Ƿ����Ñ�ͨ�^�I�Pݔ�����P(gu��n)������̖(h��o),�Ɍ�(du��)ϵ�y(t��ng)��(sh��)�F(xi��n)У������(bi��o)���Ȳ�����
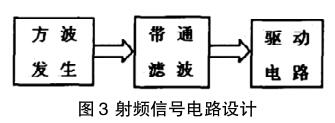
4.1.1 ���l��̖(h��o)�·�O(sh��)Ӌ(j��)
���(xi��ng)Ŀ�е����l��̖(h��o)�Ƿ�����̖(h��o)��(j��ng)�^��ͨ�V��̎���@ȡ,ԓ�·������(g��)�·�M��:�����l(f��)���·����ͨ�V���·���(q��)��(d��ng)�·,��D3��ʾ��
���ɷ����l(f��)���·�l(f��)��������̖(h��o),������̖(h��o)��(j��ng)�^��ͨ�V���·�õ�������̖(h��o)�·,#�����(q��)��(d��ng)�·��������̖(h��o)�·̎���õ�����Ҫ�����̖(h��o)�����l��̖(h��o)�����鱻�y(c��)�������ؓ(f��)�d����,���Լ���(l��)��̖(h��o)�l��Ҫʼ�K,������F(xi��n)�迹�ܴ�(�l�ʵ͵ĕr(sh��)��,�迹��)�����ݿ��ܴ�(�l���^�ߵ���r���ݿ���(hu��)�ܴ�)����r������λ�x��ȡ100KHz�����Ҽ���(l��)��̖(h��o)���l�ʡ�
4.1.2 ̎��ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
̎��ϵ�y(t��ng)��Ӳ���·�ĺ��IJ���,�P(gu��n)ϵ������(g��)�x��ϵ�y(t��ng)��������̎���ٶ��Լ����ɔ_�����ȷ�����̎��ϵ�y(t��ng)оƬ���x��ʮ���P(gu��n)�I:��ַ��ʽ�����Ĵ�С����(zh��)���ٶ������ɔ_�������_�l(f��)�h(hu��n)����ָ��Y(ji��)��(g��u)�ȷ��涼����Ҫ�����Ć��}��
4.2 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
ϵ�y(t��ng)ܛ��Ҫ��ֿ��]������(g��)ģ�K֮�g�ĺ�����,�@�Ӳ������ڸ��ӳ���ľ������{(di��o)ԇ����������λ�xܛ����,��ֿ��]�˺��ڵĜy(c��)ԇ����,���Cϵ�y(t��ng)�ķ�(w��n)�������`���ԡ����(xi��ng)Ŀ�н�λ�x������(g��)ܛ��ϵ�y(t��ng)������������ʼ������(sh��)��(j��)�ɼ�����(sh��)��(j��)̎�������I�@ʾ����(sh��)ģݔ����ͨ�ŵȎׂ�(g��)���ֽM����
4.2.1 �������O(sh��)Ӌ(j��)
��������Ҫ����ɸ���(g��)׃��(��Ҫ��ȫ��׃��)�Ķ��x����ʼ��,�O(sh��)������ܼĴ���,�_�������Д�,Ҏ(gu��)������(g��)����ϵ�y(t��ng)�Ĉ�(zh��)�����,�f(xi��)�{(di��o)����(g��)����ģ�K��
4.2.2 ��̖(h��o)�ɼ������O(sh��)Ӌ(j��)
��̖(h��o)�ɼ�������ؓ(f��)؟(z��)����(g��)ϵ�y(t��ng)�Ĕ�(sh��)��(j��)�ɼ���ģ��(sh��)�ɘӿ������ɘ�ͨ��ɢ�D(zhu��n)��������̖(h��o)�ɼ�����#��Ҫ�ăɂ�(g��)����,��D4��ʾ���ɼ�ͨ���ГQ�ȴ��_,����(l��)늉���(sh��)��������(l��)늉�̓����푑�(y��ng)늉���(sh��)����푑�(y��ng)늉�̓�����Ă�(g��)ܛ��ģ�Kͬ�r(sh��)���_,A/D�ɘ�ģ�K�_ʼ����,Ȼ��(du��)�ɘӴΔ�(sh��)�M(j��n)���Д�(���ɘӴΔ�(sh��)����5���^�m(x��)�ɘ�,���ɘӴΔ�(sh��)��5�͌��ɘӴΔ�(sh��)������0,Ȼ��ͨ���Δ�(sh��)��1),Ȼ���^�m(x��)�Д�ͨ���ɘӴΔ�(sh��)(��ͨ���ɘӵIJɘӴΔ�(sh��)��4,�t�ɘ�ͨ����0,������4�t�����_ʼ)��
4.2.3 ��(sh��)�֞V������
�V�����Կ��I(l��ng)��?q��)��y(c��)����̖(h��o)�M(j��n)��̎����#��Ҋ����,����ͨ�^��(sh��)�֞V��Ҳ����ͨ�^Ӳ���V���팍(sh��)�F(xi��n)��Ӳ���V����ʽ�^��̶�,�ɱ����^��,�Ҍ�(du��)��̎��ϵ�y(t��ng)���f,ռ�ÿ��g�^�����惦(ch��)����Ҫ���^��,���Կ������^�����ʶ�,һ����f,�ܶ��Ԅ�(d��ng)��ϵ�y(t��ng)�����Ô�(sh��)�֞V����Ӳ���V���M�ϵķ�ʽ�팍(sh��)�F(xi��n)�����(xi��ng)Ŀ����λ�x������ռ��(y��u)�V����ʽ��
5 ���l��(d��o)�{ʽ��λ�x�y(c��)����ˮ������ij�(xi��ng)Ŀ�ϵđ�(y��ng)��
5.1 �����(xi��ng)Ŀ��ˮ����y(c��)��
���l��(d��o)�{ʽ��λ�x�y(c��)����ˮ�����������(xi��ng)Ŀ�ϑ�(y��ng)�ÏV��,������ij������湤��������x���Č�(sh��)�H��(y��ng)�Þ������@����λ�x������λ�y(c��)���ĵ��͑�(y��ng)��ģ�͡�ԭ��������x��,�nj�(sh��)�F(xi��n)�����⡢ˮ������x���O(sh��)����
ԭ��������x�������A(y��)���x�^(q��)�����x�^(q��)�������ҡ����Һ͚�����ԭ���ڷ��x�����̎���A(y��)���xͲ�M(j��n)�К�Һ�������x,���x��Ě��w������������g,Ȼ��(j��ng)�^���x����(n��i)�ăɼ�(j��)�۽Y(ji��)�������Ϻ�,���w�Дy�����^С��Һ��������ײ�ۼ�����׃��,�����������³�����Һ����g,��������10μm ��Һ�α�������g���~Ƭʽ���F����,���w�Ě������������������A(y��)���xͲ���x������ˮ������½������x���ײ���������������,��ˮ�����������x����ԭ�ͷ��^�߰��M(j��n)������,������ͣ��һ�Εr(sh��)�g��,�ͺ�ˮԭ�͏��ͳ�������������Һλ�ɰ��b�������ϵ�Һλ�����b���M(j��n)�п��ơ����x����ˮ��ˮ��������,��ˮ��λ��ˮ���������ɰ��b�ڷ��x���ϵ���ˮ��������b���M(j��n)�п�����
5.2 ���l��(d��o)�{ʽ��λ�x�y(c��)����ˮ����
�����(xi��ng)Ŀ�О鱣�C���l��(d��o)�{��λ׃������que�y(c��)��,��Ҫ��(du��)���l��(d��o)�{��λ׃�����M(j��n)�����_У��(zh��n)��(bi��o)���������(xi��ng)Ŀ���c���l��(d��o)�{��λ�xһ������߀�дŷ���ʽ��λӋ(j��)LG02,������У��(zh��n)���l��(d��o)�{��λӋ(j��)֮ǰ,�ȰѴŷ���ʽҺλӋ(j��)LG02�y(c��)ԇ�ꮅ��Ͷ�������\(y��n)����Ȼ�����M(j��n)�����l��(d��o)�{��λ׃������У��(zh��n),�@�ӿ���ʹ�ôŷ���ʽ��λӋ(j��)LG02�o��У�(y��n)���l��(d��o)�{��λ׃����,ʹ֮���Ӝ�(zh��n)�_��
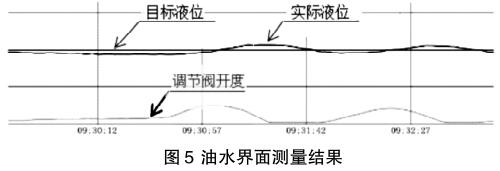
�ڌ�(sh��)�H��(y��ng)���^�������l��(d��o)�{ҺλӋ(j��)�˷�ԭ��ճ���^�ߵĆ��},�c���(d��ng)Һλ�{(di��o)��(ji��)�y(li��n)��(d��ng),��(zh��n)�_��������ˮ����߶�����ˇҪ����ˮ��λ����������0.2��0.6��֮�g,��ˮ��λ����Ŀ��(bi��o)��0.4������(j��ng)�^��Μy(c��)ԇ,����(j��)��(sh��)�HҺλ�cĿ��(bi��o)ֵƫ����,��(d��ng)�{(di��o)��(ji��)�y��PID����(sh��)�鮔(d��ng)P=80%,I=20s�r(sh��),�܉�ʹҺλ������±0.06��,�M���(xi��ng)Ŀ��ˇ���a(ch��n)Ҫ��(��D5)��
6 �Y(ji��)�Z
���l��(d��o)�{ʽ��λ�x�c���y(t��ng)���ʽ��λ�x����кܴ�ă�(y��u)Խ��,���ȸߡ���λ���c(di��n)��(bi��o)�����Ǿ���У������(sh��)��(j��)���ñ��������^����ݔ���ȃ�(y��u)�c(di��n),�ںܶ��ИI(y��)�I(l��ng)��õ��ˏV���đ�(y��ng)�������ķ��������ʽ��λ�x�����l��(d��o)�{ʽ��λ�x����ԭ��,ij������湤�̜y(c��)����ˮ����Ĺ��̌�(sh��)�H��(y��ng)��,��ԓ�(xi��ng)Ŀ��,��ʹ�õ�������x�������l��(d��o)�{ʽ��λ�x��ʯ���I(y��)�кܵ��͵�ʹ��ģ��,����Ԕ��(x��)������������x���Ĺ����h(hu��n)��������ԭ��,����λ�x�O(sh��)Ӌ(j��)�xȡ��#�K��(sh��)�F(xi��n)��һ�N�������l��(d��o)�{ʽ����ˮ����λ�x���(xi��ng)Ŀ�ϵijɹ���(y��ng)��,���y(c��)������ˮ����ֵ,�Ҝy(c��)��ֵ�����ИI(y��)��ˇҪ����










 �P(gu��n)ע�҂� ��(sh��)�F(xi��n)���A
�P(gu��n)ע�҂� ��(sh��)�F(xi��n)���A